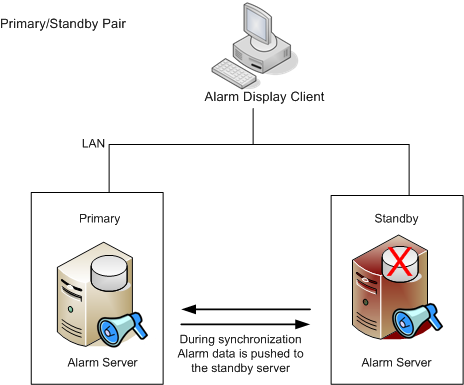
To support alarm server redundancy you can configure a main/standby pair. To keep with the terms used in previous versions of Citect SCADA the main server is called the primary server.
With a primary/standby pair only one server (the primary) updates the database. However, the display client is able to communicate with both the primary and standby servers.
On starting up, the display client will attempt to connect to the ‘main’ (primary) server. By default the alarm server which starts first will become 'main'.
If you want a display client to connect to a particular server on startup, use the parameter
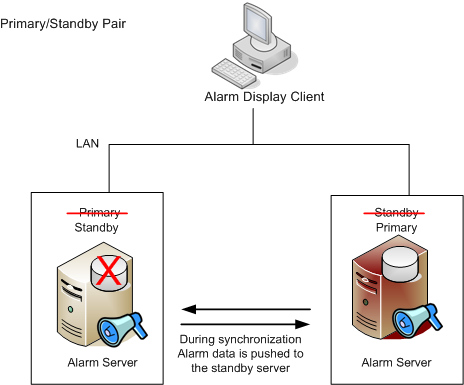
If the primary server becomes inoperative (including loss of communication with the I/O server), the standby server takes over the duties of the primary server. It will process alarm data and update the database. When the inoperative server resumes operations, it establishes communication with the other alarm server (which is now the main) and become the standby server.
Note: In cases where both the primary and standby server become isolated loss of data may occur.
During synchronization, the primary server updates the standby server. This confirms that the standby server contains data that accurately represents the data on the primary server (see Alarm Server Side Synchronization).
Note: Before starting your system for the first time (i.e. the database is empty), the primary and standby server should be connected. If not connected when the system starts, the primary and standby servers may create distinct IDs for the same objects.
See Also
Published June 2018